A Robust State Estimator for Legged Robots using Visual-Inertial-Leg Kinematics in the Wild
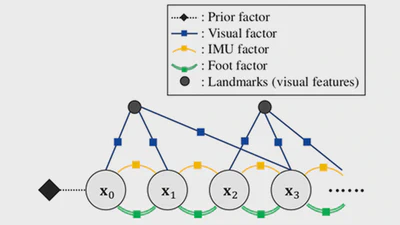
A robust legged-robot state estimator that extends VINS-Fusion by adding a preintegrated foot velocity factor, enabling reliable estimation in outdoor in-the-wild conditions …
Byeongho Yu