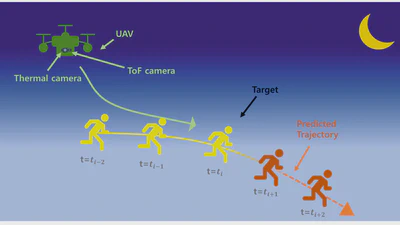
TPL: Trajectory Planner for Target Tracking in Low-Light Environments
A trajectory planning framework for UAV target tracking in low-light environments, combining thermal and ToF-based perception with minimum-snap trajectory optimization under …
Seunghyun Lee*