QR-SCAN: Traversable Region Scan for Quadruped Robot Exploration using Lightweight Precomputed Trajectory
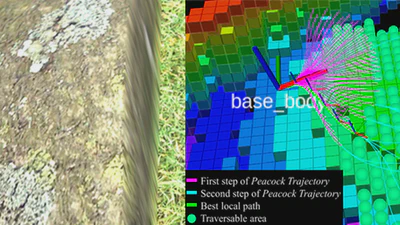
A lightweight local exploration planner for quadruped robots that uses kinodynamics-aware precomputed trajectories and a two-step cylindrical collision/traversability check (via …
Eungchang Mason Lee