CHADET: Cross-Hierarchical-Attention for Depth-Completion Using Unsupervised Lightweight Transformer
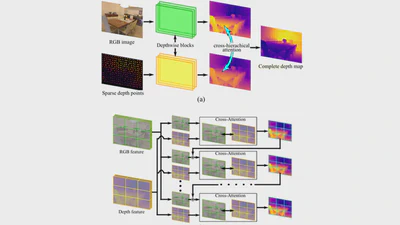
An unsupervised lightweight transformer for depth completion that fuses RGB and sparse depth using depthwise blocks and a cross-hierarchical-attention decoder to improve edge …
Kevin Christiansen Marsim