Fuzzy Logic and Neural Network-Based Intelligent Control System for Quadruped Robot on Extreme Terrain
Nov 20, 2023·
,,
Jinwoo Jeon
Myungwoo Jeong
Hyun Myung†
Advisor
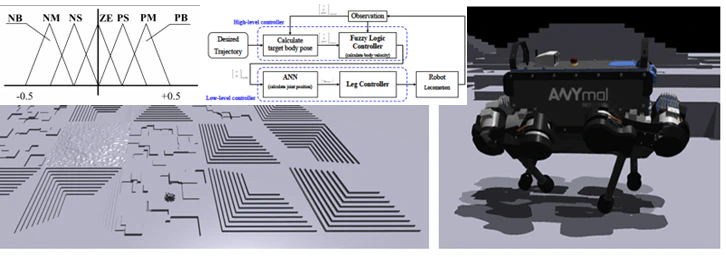
We propose FLONIC-Q, a quadruped control framework that uses parallel MFLC for high-level trajectory following and a learning-based low-level controller to maintain stable tracking on extreme terrains, outperforming PID baselines in simulation.