TROT-Q: Traversability and Obstacle Aware Target Tracking System for Quadruped Robots
Jul 20, 2022·
,,
Eungchang Mason Lee
Jinwoo Jeon
Hyun Myung†
Advisor
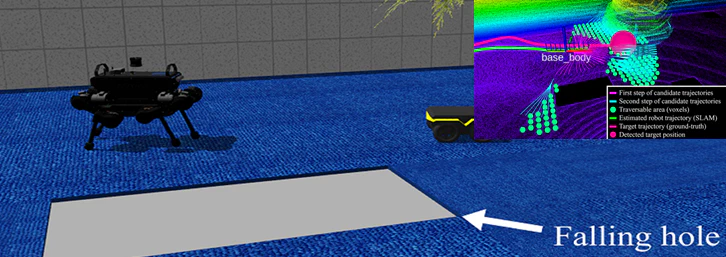
We propose TROT-Q, a quadruped target-tracking framework that estimates robot state via LiDAR-inertial SLAM and target position via RGB-D object detection, selects a safe local trajectory by combining traversability/obstacle checks with target-proximity scoring, and tracks it using a hierarchical MPC+PD controller.