A Robust State Estimator for Legged Robots using Visual-Inertial-Leg Kinematics in the Wild
Nov 27, 2022·
,,,,
Byeongho Yu
Yeeun Kim
Jinwoo Jeon
I Made Aswin Nahrendra
Hyun Myung†
Corresponding author
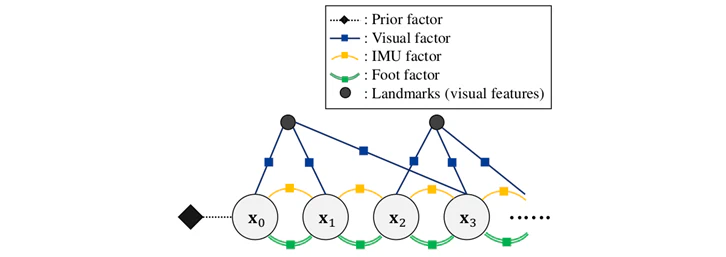
We propose a visual-inertial-leg kinematics state estimator that augments VINS-Fusion with a preintegrated foot velocity factor to reduce drift under slip-prone outdoor conditions without relying on non-slip assumptions.