QR-SCAN: Traversable Region Scan for Quadruped Robot Exploration using Lightweight Precomputed Trajectory
Oct 12, 2021·
,,,
Eungchang Mason Lee
Donguk Seo
Jinwoo Jeon
Hyun Myung†
Corresponding author
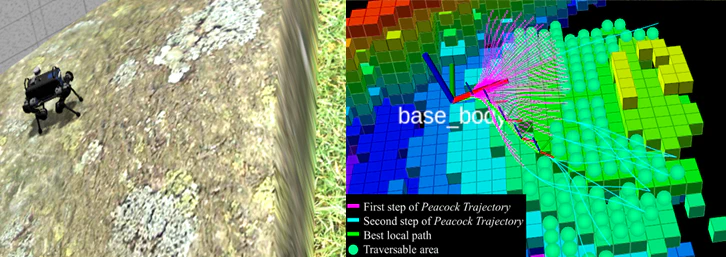
We propose QR-SCAN, a lightweight local exploration planner that selects safe and traversable trajectories for quadruped robots by combining kinodynamics-aware precomputed motion primitives with strict two-step cylindrical collision and traversability checks in a receding-horizon manner.