Run Your Visual-Inertial Odometry on NVIDIA Jetson: Benchmark Tests on a Micro Aerial Vehicle
Apr 26, 2021·
,,
Jinwoo Jeon*
Equal contribution
,Sungwook Jung*
Equal contribution
,Eungchang Lee
Duckyu Choi
Hyun Myung†
Advisor
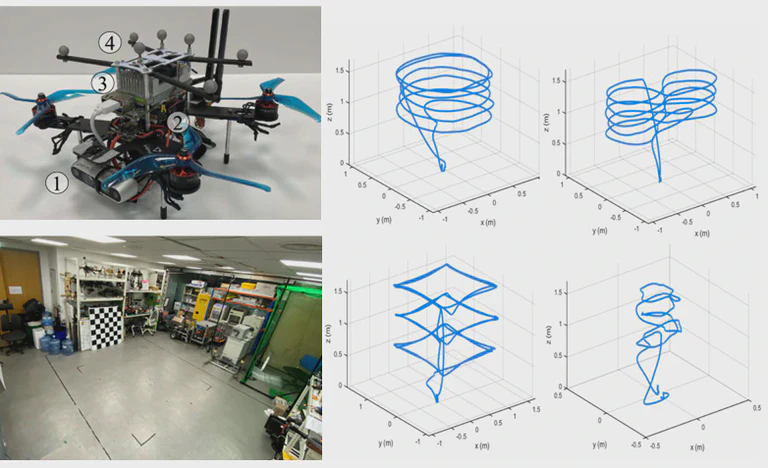
We present a comprehensive benchmark of visual and visual-inertial odometry algorithms on various NVIDIA Jetson platforms, analyzing accuracy and computational efficiency.