Publications
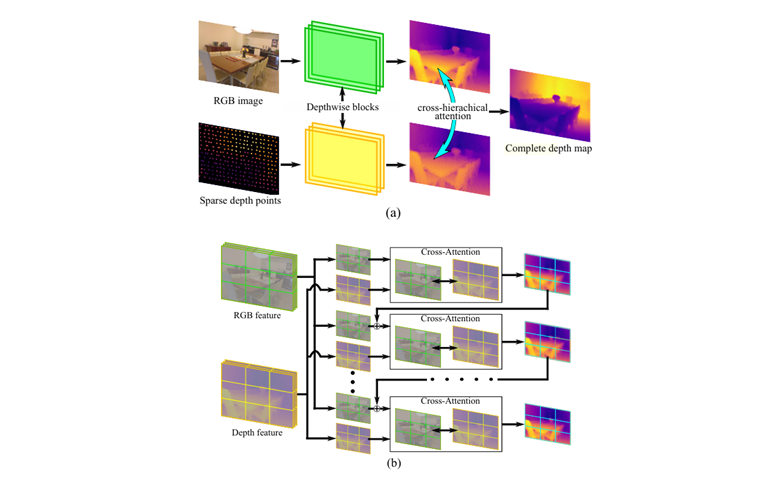
CHADET: Cross-Hierarchical-Attention for Depth-Completion Using Unsupervised Lightweight Transformer
Kevin Christiansen Marsim, Jinwoo Jeon, Yeeun Kim, Myeongwoo Jeong, Hyun Myung†
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
Jinwoo Jeon, Myungwoo Jeong, Hyun Myung†
International Conference on Control, Automation and Systems (ICCAS) 2023
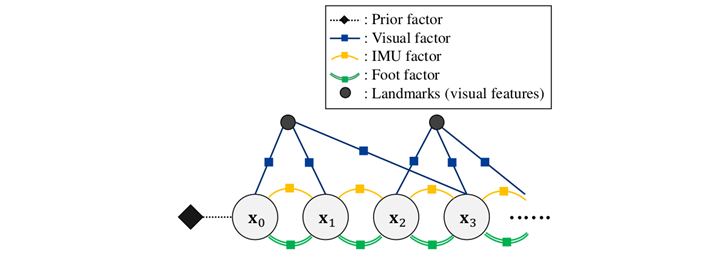
A Robust State Estimator for Legged Robots using Visual-Inertial-Leg Kinematics in the Wild
Byeongho Yu, Yeeun Kim, Jinwoo Jeon, I Made Aswin Nahrendra, Hyun Myung†
International Conference on Control, Automation and Systems (ICCAS) 2022
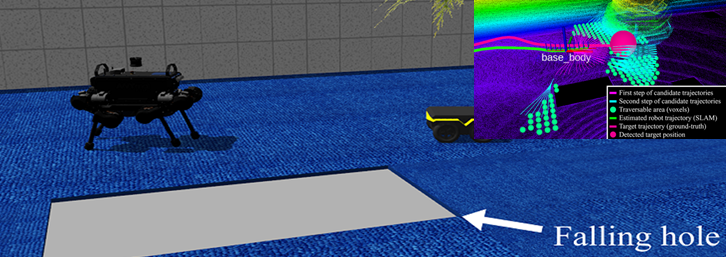
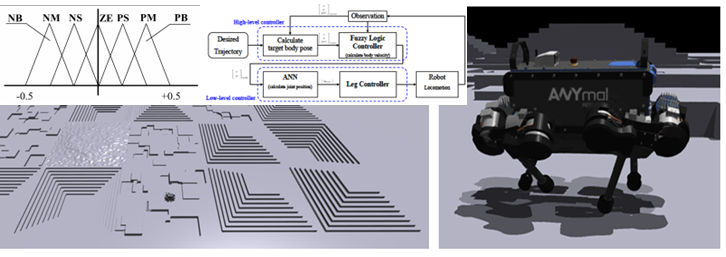
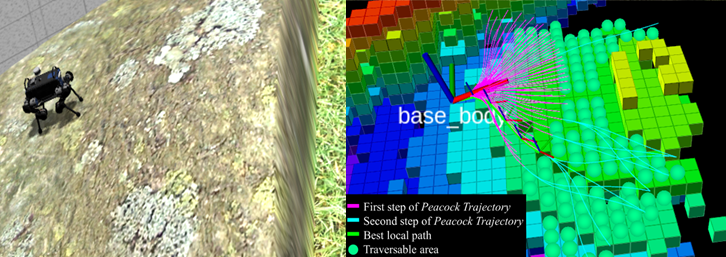
TROT-Q: Traversability and Obstacle Aware Target Tracking System for Quadruped Robots
Eungchang Mason Lee, Jinwoo Jeon, Hyun Myung†
Asian Control Conference (ASCC) 2022
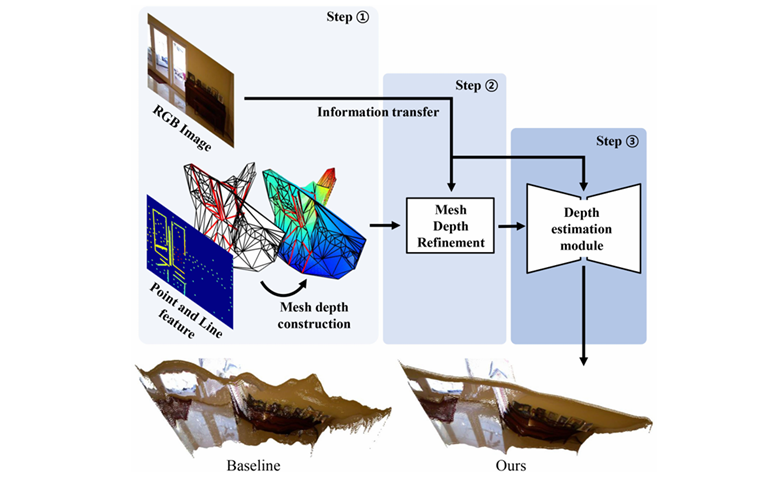
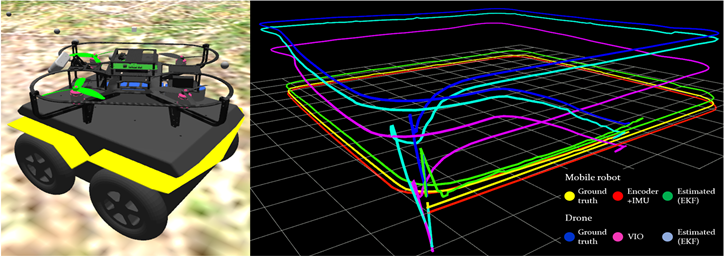
Jinwoo Jeon, Hyunjun Lim, Donguk Seo, Hyun Myung†
IEEE Robotics and Automation Letters (RA-L) 2022
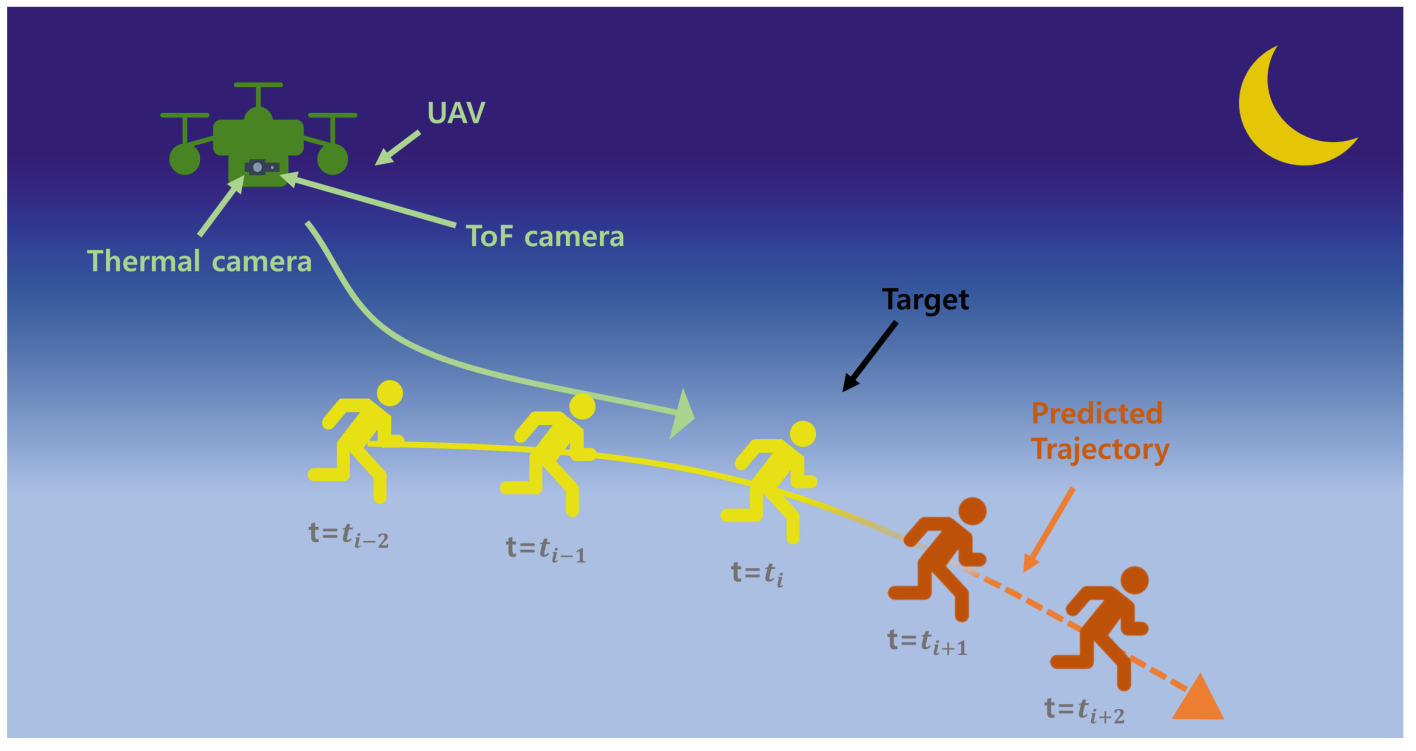
TPL: Trajectory Planner for Target Tracking in Low-Light Environments
Seunghyun Lee*, Sumin Chang*, Eungchang Mason Lee, Junho Choi, Jinwoo Jeon, Seoktae Kim, Hyun Myung†
International Conference on Robotics Technologies and Applications (RiTA) 2021
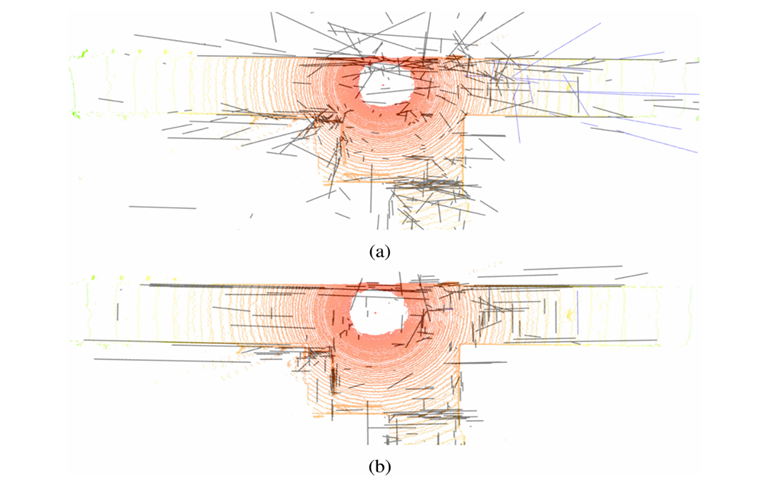
UV-SLAM: Unconstrained Line-Based SLAM Using Vanishing Points for Structural Mapping
Hyunjun Lim, Jinwoo Jeon, Hyun Myung†
IEEE Robotics and Automation Letters (RA-L) 2022
EungChang Mason Lee, DongUk Seo, JinWoo Jeon, Hyun Myung†
International Conference on Control, Automation and Systems (ICCAS) 2021
ChanYoung Kim*, EungChang Mason Lee*, JunHo Choi, JinWoo Jeon, SeokTae Kim, Hyun Myung†
International Conference on Control, Automation and Systems (ICCAS) 2021
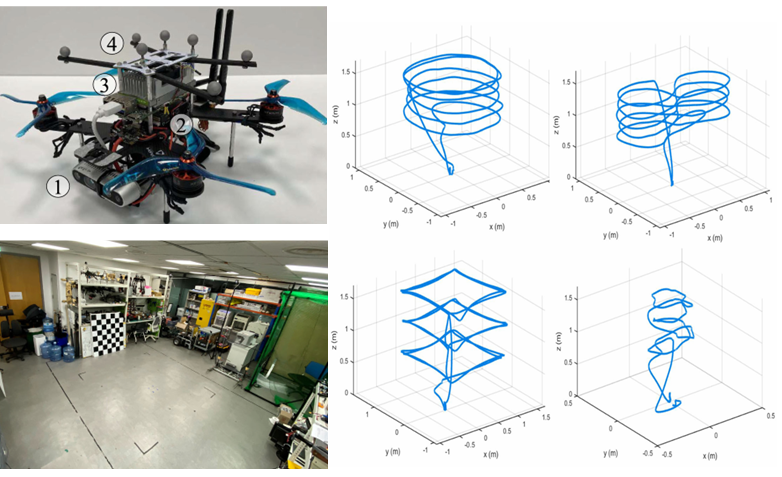
Run Your Visual-Inertial Odometry on NVIDIA Jetson: Benchmark Tests on a Micro Aerial Vehicle
Jinwoo Jeon*, Sungwook Jung*, Eungchang Lee, Duckyu Choi, Hyun Myung†
IEEE Robotics and Automation Letters (RA-L) 2021