Professional Summary
Research Interests
- Visual SLAM
- Monocular and Multi-view visual SLAM
- Learning-based SLAM
- Visual-Inertial Sensor Fusion
- 3D Perception for Robotics Vision
- Depth Estimation, Depth Completion
- Dense 3D Reconstruction from Images
- Foundation Models for 3D Understanding
- Proprioceptive Sensor-based Odometry
- Deep Inertial Odometry
Education
I am currently pursuing my Ph.D. at Korea Advanced Institute of Science and Technology (KAIST) under the supervision of Professor Hyun Myung.
- 2023.02 – Present · Ph.D. student, Electrical Engineering, KAIST
- 2021.03 – 2023.02 · M.S., Electrical Engineering, KAIST
- 2016.03 – 2021.02 · B.S., Electrical Engineering & School of Computing (*minor major), KAIST
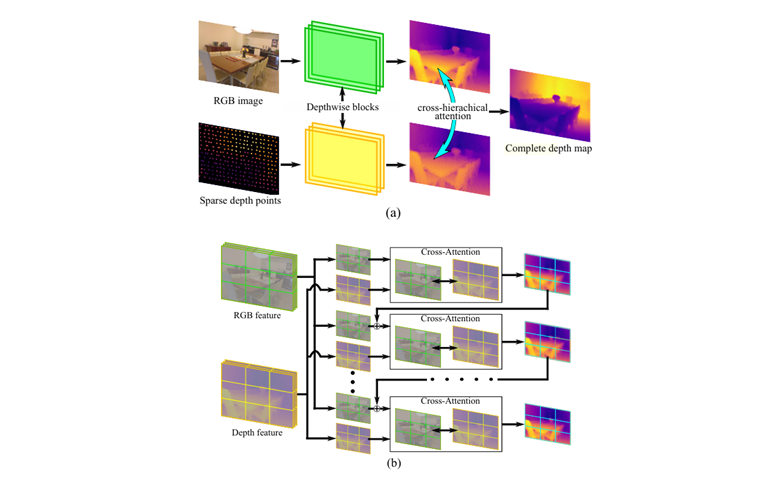
CHADET: Cross-Hierarchical-Attention for Depth-Completion Using Unsupervised Lightweight Transformer
Kevin Christiansen Marsim, Jinwoo Jeon, Yeeun Kim, Myeongwoo Jeong, Hyun Myung†
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
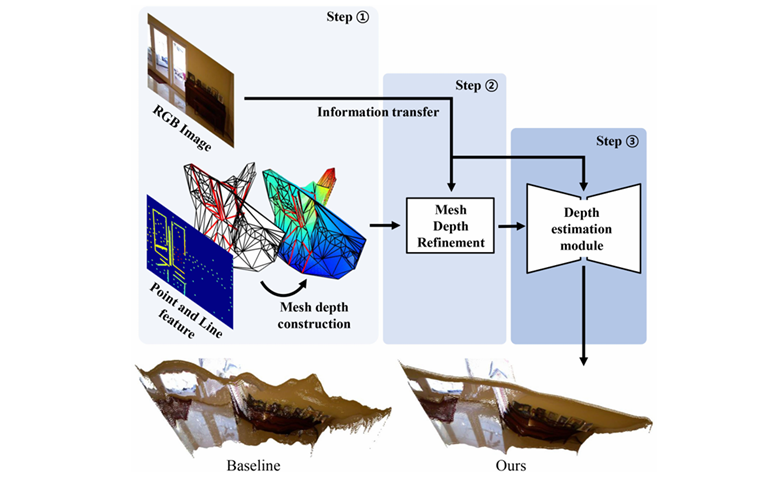
Jinwoo Jeon, Hyunjun Lim, Donguk Seo, Hyun Myung†
IEEE Robotics and Automation Letters (RA-L) 2022
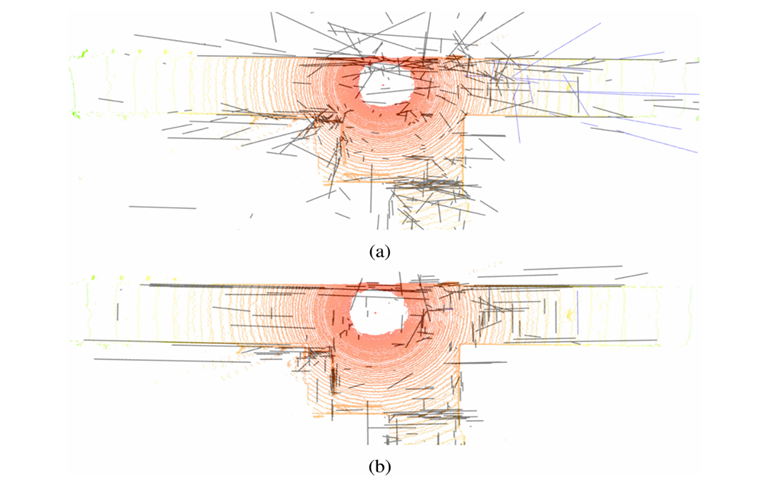
UV-SLAM: Unconstrained Line-Based SLAM Using Vanishing Points for Structural Mapping
Hyunjun Lim, Jinwoo Jeon, Hyun Myung†
IEEE Robotics and Automation Letters (RA-L) 2022
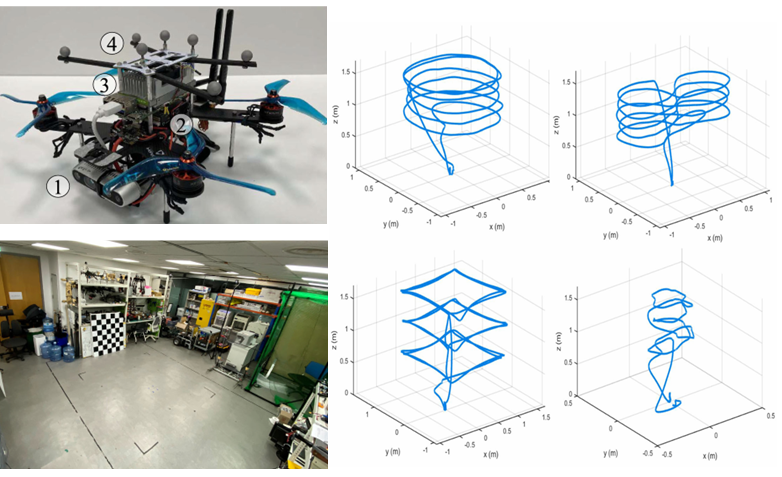
Run Your Visual-Inertial Odometry on NVIDIA Jetson: Benchmark Tests on a Micro Aerial Vehicle
Jinwoo Jeon*, Sungwook Jung*, Eungchang Lee, Duckyu Choi, Hyun Myung†
IEEE Robotics and Automation Letters (RA-L) 2021
The first open-source project to port VINS-Fusion, a widely used feature-based visual odometry framework, to ROS 2 …